

ラジコンカーを利用し、2点間(20m)をGPSを受信しながら、マイコン制御により∞の様に
回る競技で、これをトラクターでテストを兼ね挑戦しています。
GPS・QZSSロボットカーコンテスト



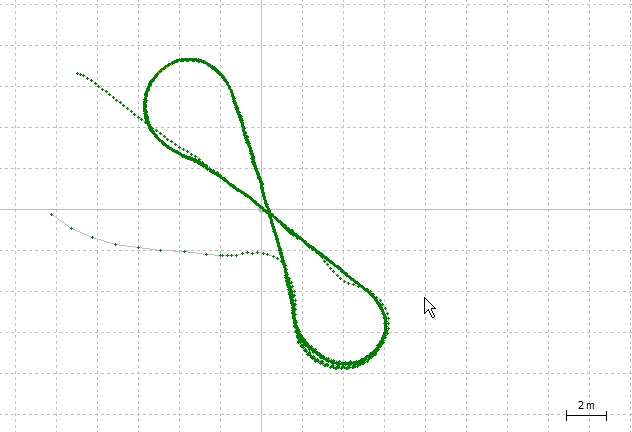
上から入って左で終了 約35分で14周しました。 ( 2015/12 )
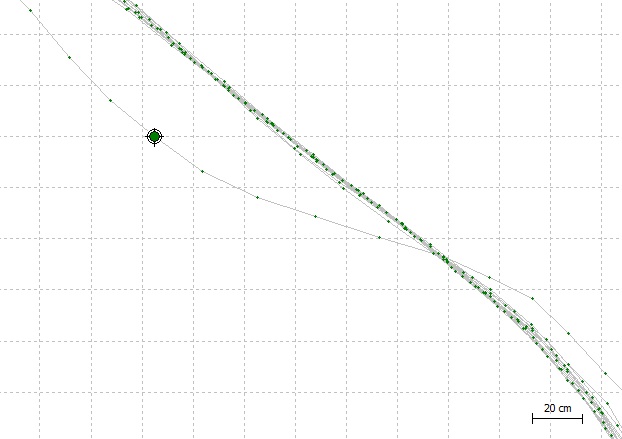
全体を見ると綺麗な8字になっています
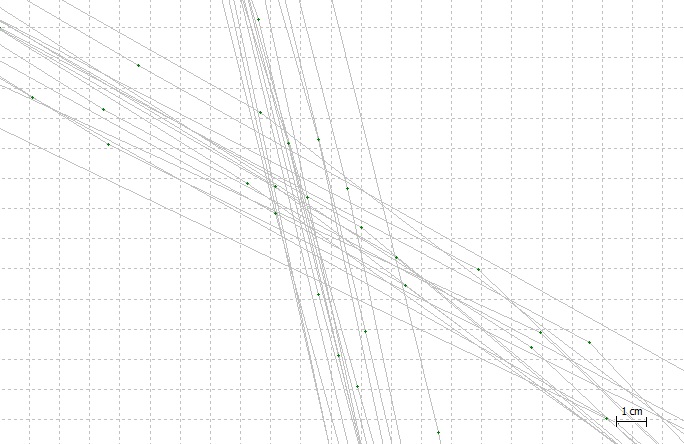
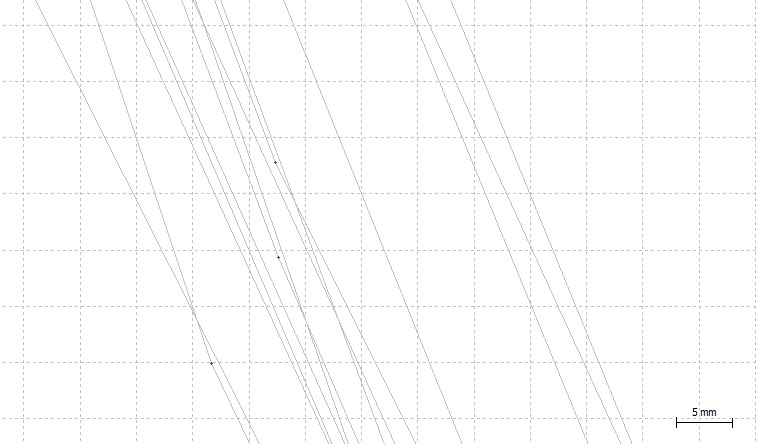
直線部分を拡大すると誤差は±30mm程度 (GPSの精度ではなくトラクターの軌跡)
きっとGPSロボットカーで精度部門が有れば優勝だ?
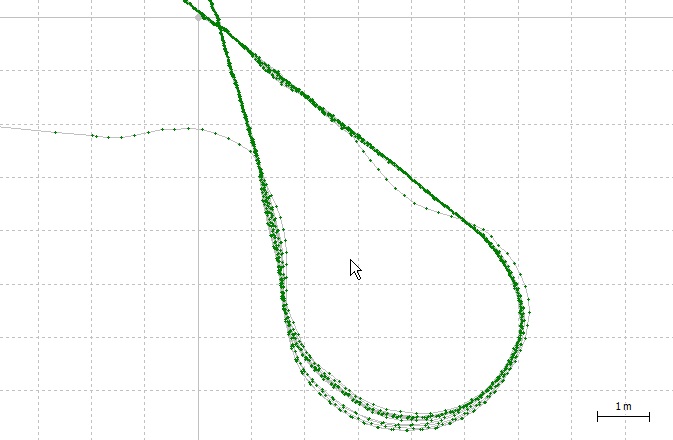
とは言え 速度も遅いし同じ所を回っているので道が出来ているからだと思う。(写真2)
実精度は±50mm程度か?
農機具としてはまだ課題が有ります。
円弧から直線部分に変わって約3m位移動しないと精度が出ない
円弧制御をいろいろ試しては要るのですが未だに・・・・・
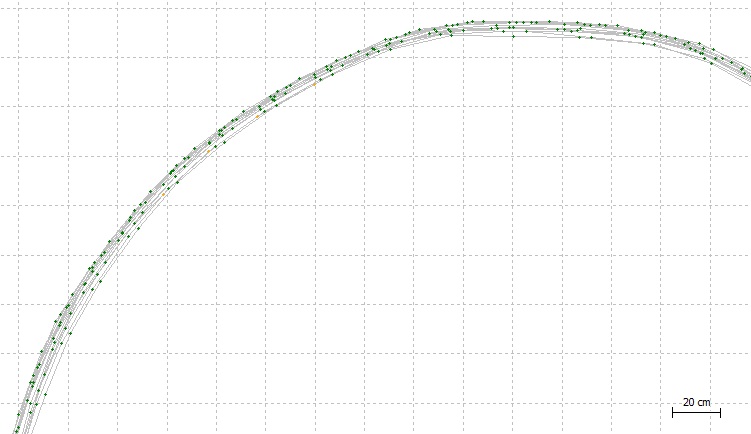
上の円弧は安定していますが下の円弧はバラツキが大きい。この原因は、バグ,
左右での
ハンドルのガタ、GPS測位誤差か?不明です。
最大誤差が約300mm見た目は制御を感じて嬉しいのですが、最終的に誤差は半分以下には収めたい?
スマホ、マイコン、PCと3本のソフト、ハードを作成し、妄想から3年やっと入口こ立てました。
始めは自転車のチューブでハンドルを回し、GPSをFIXしても1時間程度でテストに
時間が掛かり泣く 無知だから出来たと事だと思います。
今は(LEA-M8T)GPS、EU、中国、日本の衛星が受信できる環境も整いほぼ24時間テストが可能になりました。
各国で衛星を打ち上げインフラが整い、安価な受信機で利用できる環境に感謝。
オープンソースのRTKLIBに感謝。
OSQZSS このページとの出会いが無かったら開発は1年は遅くなっていたと思う。
このページに出会えたことに感謝。
本来の自動運転トラクターとして使えるか挑戦です。(2016/08)